Actuellement pensionné, je souhaite poursuivre quelques activités dans mes domaines d'expérience et partager cette dernière. C'est une synthèse de cette offre (en continuelle adaptation !) que vous trouverez sur ces pages.
Culture code.
Je me sers ici de mes formations en sciences humaines, pour donner du sens à mes connaissances techniques informatiques. Mon objectif est socio-culturel, c.-à-d., en partant le plus souvent de l'aspect informatique (plutôt que numérique), de permettre aux personnes à qui je m'adresse, de s'approprier "les choses" et de prendre conscience de ce qui, dans leur environnement, les détermine, les gouverne, ou simplement les influence.
 Aie confiance !
Aie confiance !- Développement
- Robotique
- Gestion de projet
- Histoire de l'informatique
- L'arbre des possibles
Robotique pédagogique
Objectifs généraux.
- Développer une vision de ce qu'on veut et apprendre à la planifier.
- Analyser, réfléchir, avant de programmer.
- Identifier les problèmes, chercher des solutions et les mettre en oeuvre.
- Travailler ensemble en collaborant sur une tâche technique.
- Apprentissage de la pensée informatique (logique, formalisme du langage, ...).
- Développement de l'esprit critique à propos des technologies.
Initiation au développement robotique : phase I (programmation visuelle,VPL).
VPL pour Visual Programming Language, Langage de programation Visuel.
Contenu de la formation.
Démarche :
- 1 équipe de 4 personnes : analyse, collaboration en interne, programmation.
- 2 équipes de 5 personnes : concertation entre les équipes, analyse, collaboration en interne, programmation.
Base :
- Le robot vivant (imitation du robot).
- Présentation du robot.
- Aperçu du langage VPL simplifié.
- [moteurs] Avancer, reculer, tourner.
- [capteurs] S'arrêter (reculer) au bord de la table.
- [capteurs] S'arreter (reculer) devant un obstacle.
- [capteurs] Suivre une ligne.
- [capteurs] Suivre un couloir étroit.
- Eventuellement, autres capteurs.
Collaboration, concertation :
Quelque soit l'objectif, on s'inspirera ici des recommandations proposées ici à propos des rôles des participants dans une équipe à un événement R2T2.
Objectifs possibles
R2T2 (Remote Rescue Thymio II) Mars.
Cet événement est organisé par l'EFPL (École polytechnique fédérale de Lausanne) et est occasionnel : Nous sommes en 2032. Une météorite a endommagé une station d'approvisionnement d'énergie sur Mars. Il s'agit d'évaluer les dégâts et remettre en marche le générateur principal. Sur Mars, 16 robots aux entrées de la station peuvent être contrôlé par des équipes de spécialistes depuis la terre. Entre Mars et la terre il y a un retard dans la transmission vidéo et contrôler les robots en direct à distance est impossible. C'est pourquoi les experts sur terre devront programmer les robots pour résoudre la tâche.
Site de présentation de l'événement.
Scénarios alternatifs ou les aventures de thym et Mio.
Il n'y a pas tout le temps d'événements R2T2. Nous imaginons donc des scénarios alternatifs. Nous nous basons pour construire ces scénarios sur la préparation des équipes pour un événement R2T2 et sur leur outil zone utile à cette préparation. Les scénarios sont des histoires fictives destinées à soutenir l'intérêt et la motivation dans l'apprentissage et l'accomplissement des tâches.
Types de scénarios (fictifs) possibles basés sur l'outil zone R2T2 :
Cliquer ici pour afficher l'outil zone de préparation d'un événement R2T2 adapté aux scénarios alternatifs.
NB : ces scénarios sont adaptés à une équipe de deux robots. Mais on peut très bien adapter à un seul robot, ou plus de deux.
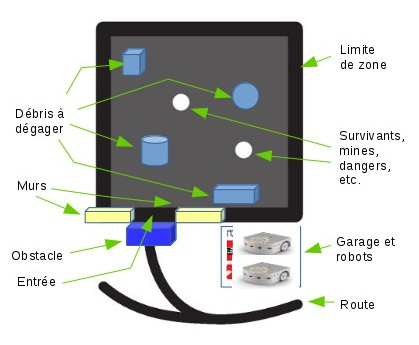
Secours après un tremblement de terre.
Un terrible tremblement de terre vient de ravager le Mormor. On a entendu des appels au secours en provenance de la plaine centrale du pays. Il y a deux survivants ! Cependant la zone où ils se trouvent est encombrée d'énormes débris et extrêmement dangereuse à explorer. C'est pourquoi, les robots Thym et Mio vont partir à la recherche de ces deux survivants en évitant de bousculer les gros débris et ramener les personnes saines et sauves. Ensuite, ils retourneront dégager la zone des gros débris, pour que les secours puissent enfin progresser en sécurité.
Tâches :
- Les robots Thym et Mio ont été amenés sur une plateforme de secours à proximité de la zone à explorer (garage).
- Un des deux (au choix) écarte l'obstacle et libère l'accès à l'entrée.
- Thym et Mio entrent alors chacun à leur tour dans la zone ravagée via la route noire.
- Ils recherchent chacun un survivant (point blanc), sans heurter les débris (risque pour les survivants).
- Quand un robot a trouvé un survivant, il s'arrête dessus et le signale en allumant sa led rouge du dessus.
- Quand les 2 survivants sont retrouvés, Thym et Mio les ramènent à l'entrée de la zone où il seront récupérés par les équipes médicales en attente. Attention, pour préserver les personnes, Thym et Mio ne peuvent pas faire d'accident (choc avec les débris) !
- Ensuite, Thym et Mio retournent dans la zone et dégagent les débris (les repoussent hors de la zone).
- Quand c'est fait, ils rejoignent leur plateforme de départ en vue d'une nouvelle aventure.
Aménagement d'une aire de jeu.
The Strawberry Statement.
En 2068, les manifestants étudiants de l'université de Bolumbia, alliés à la population locale, ont enfin gagné leur combat. Le gymnase de l’université ne sera pas construit sur le site voisin d'Eveningside Park, mais au contraire, celui-ci sera transformé en aire de jeux pour les enfants défavorisés du quartier. Sensible au social et soucieuse de maintenir une bonne image de marque, la firme locale Remember a décidé de prêter ses robots Thym et Mio au comité de quartier pour aider à un premier gros déblaiement du terrain. En effet, les manifestations, particulièrement violentes, des derniers mois, ont laissé de gros stygmates dans le parc. C'est pourquoi, les robots Thym et Mio vont parcourir l'endroit, le dégager des plus gros débris et combler quelques excavations dangereuses; afin que les architectes urbains puissent intervenir et aménager l'aire de jeux.
Tâches :
- Les robots Thym et Mio ont été amenés, sur leurs camions respectifs, à proximité de la clôture d'Eveningside Park (garage).
- Un des deux (au choix) écarte la barricade qui bloque l'entrée et libère l'accès au parc (entrée de la zone).
- Thym et Mio y entrent chacun à leur tour via la route noire.
- Ils recherchent les débris laissés par les affrontements et les repoussent hors du Park.
- Une fois cela fait, ils recherchent chacun une des 2 excavations (point blanc) à combler.
- Quand un robot a trouvé une excavation, il s'arrête dessus et et commence à la comnler. Il signale cette action en allumant sa led rouge du dessus.
- Quand les 2 excavations sont retrouvées et comblées, Thym et Mio quitten le Park, par son entrée (à hauteur de la route noire).
- Thym et Mio suivent la route noire et rejoignent leurs camion respectifs. L'aménagement d'Eveningside Park en aire de jeu peut enfin commencer.
Sécurisation d'une zone de guerre.
En reculant devant la résistance de la Guilde des Jantis et en abandonnant le Qolcar, les Maikrayants (forces des ténèbres) ont laissé derrière eux une région ravagée et minée, extrêmement dangereuse à explorer et à réhabiliter. C'est pourquoi, les robots Thym et Mio vont l'explorer, la déminer et enfin la dégager des plus gros débris; afin que les reconstructeurs puissent rebâtir une région où avant, il faisait bon vivre.
Tâches :
- Les robots Thym et Mio ont été déposés sur un héliport à proximité de la frontière du pays (garage).
- Un des deux (au choix) écarte l'obstacle et libère l'accès au poste frontière (entrée de la zone).
- Thym et Mio entrent chacun à leur tour dans le Qolcar via la route noire.
- Ils recherchent chacun une mine (point blanc), sans heurter les débris (qui risquerait alors de tomber sur une mine).
- Quand un robot a trouvé une mine, il s'arrête dessus et y place des explosifs destinés à détruire l'engin. Il signale cette action (particulèrement dangereuse) en allumant sa led rouge du dessus.
- Quand les 2 mines sont retrouvées et piégées, Thym et Mio reviennent se mettre en sécurité au poste frontière, hors de la région sinistrée. Attention, pour éviter un explosion prématurée d'une mine, les robots ne peuvent pas faire d'accident les débris !
- Les mines piégées peuvent maintenant exploser; une fois cela fait, Thym et Mio retournent dans la région et le dégagent les débris (les repoussent en dehors).
- Quand cette tâche est finie, ils rejoignent l'héliport en vue d'être embarqués vers sune nouvelle mission.
- Autres scénarios; à votre libre imagination ...
Types de scénarios (fictifs) possibles basés sur d'autres zones d'action imaginaires :
Les feux rouges, c'est « has been »!
2030. La voiture autonome est enfin au point. Il reste bien une pointe de nostalgie, car les « ancêtres » sont désormais interdits sur les routes ouvertes au public; et cette vieille «
2CV » si sympathique ne peut maintenant plus circuler que sur des routes privées. D'un autre côté, il n'y a plus besoin de feux rouges et plus aucun piéton n'est écrasé, car les capteurs des voitures détectent maintenant automatiquement les incidents et corrigent les problèmes potentiels. C'est à vous de mettre au point et de tester les algorithmes de respect de la priorité de droite et d'évitement des obstacles se présentant devant le véhicule. Pour faire ce job, vous disposez d'un anneau en 8 à sens unique, qui est un circuit de test. Attention, des vies dépendent de vous !NB : 1) Ce scénario pour être intéressant, nécessite 2 robots.
2) le problème présenté ici est assez simple. D'apparence ! Car cela pourrait se compliquer en phase II (programmation textuelle); avec l'utilisation de messages asynchrones entre robots pour corriger certains problèmes, comme le choix d'un système de régulation des vitesses en cas de rattrapage d'un robot par un autre sur la boucle. Mais cela nécessite la programmation textuelle, et c'est pour plus tard ! ;)Tâches :
Les robots Thym et Mio sont placés chacun au centre d'un des cercles du 8. De là, ils rejoignent l'anneau dans les conditions suivantes : Thym déterminera le sens de circulation en s'engageant sur son cercle dans le sens horlogique. Mio adaptera son comportement pour circuler dans le même sens que Mio. Pour l'intéret de l'expérience, Thym roulera à 150% (à vérifier) de la vitesse de Mio.
- Les analystes en charge de Mio analysent le sens dans lequel doit s'engager Mio sur son cercle. Ils communiquent leur résultat à l'équipe en charge de Thym.
- Les analyste de l'équipe en charge de Thym vérifient les résultats des analystes de l'équipe en charge de Mio et lui communiquent leur décision.
- Si ou quand tout le monde est d'accord, les robots démarrent et rejoignent le circuit sous les conditions suivantes :
- Quand un des robots croise l'autre, il doit céder la priorité à celui qui vient de droite.
- Si un obstacle se présente devant un robot, il doit s'arrêter jusqu'à ce que la voie soit à nouveau libre. Notez que l'obstacle peut-être n'importe quoi qui traverse la route, voire un robot qui se serait engagé à contresens !
- Si un robot rattrape l'autre, ils doivent s'arrêter tous les deux, et l'expérience s'arrête; du moins dans cette phase I (programmation visuelle).
- Autres scénarios; à votre libre imagination ...
Outils.
- Robot Thymio II.
- Langage visuel (VPL).
- Matériel physique : Divers types de sol, blocs en bois pour délimiter des couloirs, ...
- Le matériel physique qu'une équipe aurait envie de produire.
Durée.
5 séances de 3 heures (estimation à ce stade)
Public
De 10 - 14 ans -> 99 ans.
Remarques
Exemples de programmation :
Quelques travaux expérimentaux ou préparatoires...
Initiation au développement robotique : phase II (programmation textuelle, Aseba).
Langage de programmation texte de Aseba.
Prérequis : Initiation au développement robotique (VPL) ou une expérience de base en programmation événementielle.
Contenu de la formation.
La constructuction de cette formation est en phase exploratoire.
Pour mémoire : timer, bits d'état, utilisation avancée des capteurs de proximité et de sol.
Outils.
- Robot Thymio II.
- Langage texte (Aseba).
- Descripion des bits d'états du Thymio (pdf). Le même avec un filigrane à mon nom (pdf).
- Systèmes de numération.
Durée.
5 séances de 3 heures (estimation à ce stade)
Public
De 14 ans -> 99 ans.
Remarques
-